A* Pathfinding
|
Today I am going to talk about path finding, more specifically A* path finding which is just one of many methods of doing path finding. What is path finding?
Essentially, path finding is a technique for finding a way trough a bunch of obstacles from point A to point B.
In general you apply path finding with AI, but there are other cases that path finding is used as well.
What is A*?
A* is a heuristic graph based algorithm.
A grid of nodes is used to find the fastest way trough point A to point B.
Why do we need path finding?
Since we are making a stealth based game with guards that will be able to detect the player, we need them to know where you are and how to get to you. All of our guards has a chase state and when they are in that state, they will run/walk to you and start shooting. At first, our guards just went straight to you, not taking any obstacles like walls and furnaces into account. So how did we implement this?
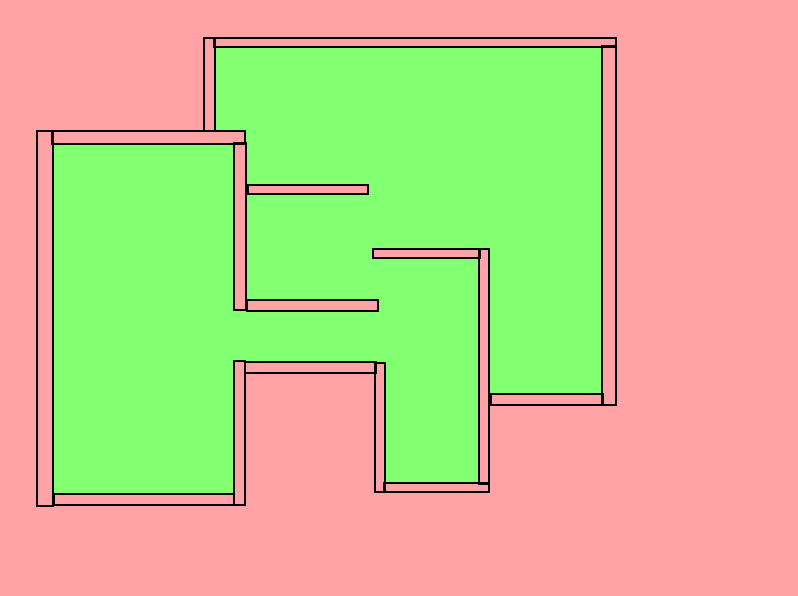
The first thing I did was to figure out all the regions where the guard can walk trough.
I started of by figuring out where the guard could walk.
The map itself is really just a big bunch of nodes. Here is an image explaining how the nodes are defined in the grid.
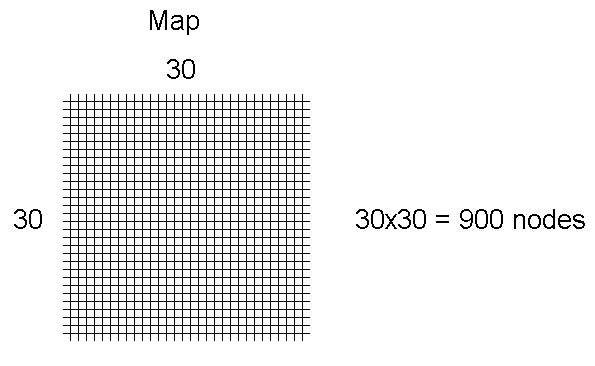 Now our nodes are not that small, but 32×32 pixels.
Okay lets continue. Every node has to know some things about itself. Lets say our map is 100×100 nodes large, which is equal to 10.000 nodes! ———————————————————————————————————- Enough about this now. Lets look on how we can implement this in logic. Now he need to check all of its neighbors. (check image)  So we need to tell which neighbor we should walk to.
This is done by giving each node a specific value called F.
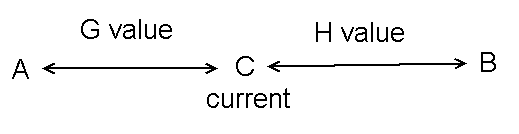
The F value is a sum of two other values called G and H.
The G value is the movement cost from start to current node.
The H value is the movement cost from end to current node. (check the image below)
 But the thing is, we does not know the H value yet, we will just estimate it.
The H value is calculated by using a method called Manhattan distance. Manhattan method just counts the number of horizontal and vertical nodes remaining to reach point B.
To optimize, we use a list called the open list and the closed list.
The open list is a list of nodes that needs to be checked for neighbors.
The closed list is a list of nodes containing nodes we already checked.
Finally the guard will find the shortest path by repeating these simple steps:
Conclusion:
Since I have made pathfinding before I knew how to implement it and it really went fast.
The only troubles I had was to figure out where the guard could walk. But it was solved. Since we use a semi-grid based map it was not that troublesome I expected it to be. But that actually took more time than creating the actual algorithm.
Resources:
I followed this article on the A* algorithm(http://theory.stanford.edu/~amitp/GameProgramming/)
And here is the result. http://pastebin.com/4Xhk7DgM
|